
Struktur dan desain kendaraan listrik murni berbeda dengan kendaraan bermesin pembakaran internal tradisional. Ini juga merupakan rekayasa sistem yang kompleks. Perlu mengintegrasikan teknologi tenaga baterai, teknologi penggerak motor, teknologi otomotif dan teori pengendalian modern untuk mencapai proses pengendalian yang optimal. Dalam rencana pengembangan ilmu pengetahuan dan teknologi kendaraan listrik, negara ini terus berpegang pada tata letak penelitian dan pengembangan "tiga vertikal dan tiga horizontal", dan lebih jauh menyoroti penelitian tentang teknologi utama umum "tiga horizontal" sesuai dengan strategi transformasi teknologi. “penggerak listrik murni”, yaitu penelitian tentang motor penggerak dan sistem kendalinya, baterai tenaga dan sistem pengelolaannya, serta sistem kendali powertrain. Setiap produsen besar merumuskan strategi pengembangan bisnisnya sendiri sesuai dengan strategi pembangunan nasional.
Penulis memilah teknologi utama dalam proses pengembangan powertrain energi baru, memberikan landasan teori dan referensi untuk desain, pengujian, dan produksi powertrain. Rencana tersebut dibagi menjadi tiga bab untuk menganalisis teknologi utama penggerak listrik pada powertrain kendaraan listrik murni. Hari ini, pertama-tama kami akan memperkenalkan prinsip dan klasifikasi teknologi penggerak listrik.
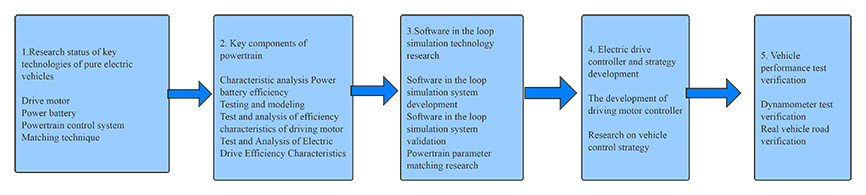
Gambar 1 Tautan Utama dalam Pengembangan Powertrain
Saat ini, teknologi inti utama dari powertrain kendaraan listrik murni mencakup empat kategori berikut:
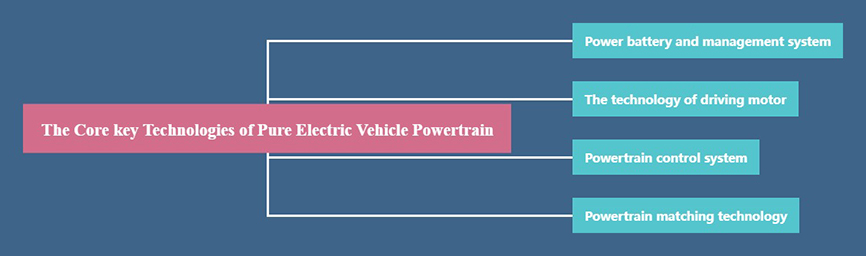
Gambar 2 Teknologi Utama Inti Powertrain
Pengertian Sistem Penggerak Motorik
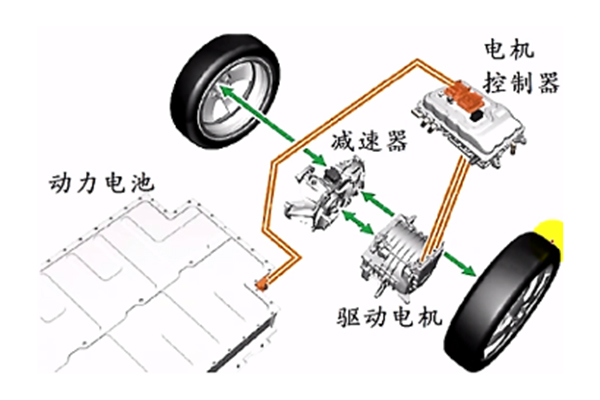
Menurut status baterai daya kendaraan dan kebutuhan daya kendaraan, baterai ini mengubah keluaran energi listrik dari perangkat pembangkit listrik penyimpanan energi di dalam kendaraan menjadi energi mekanik, dan energi tersebut disalurkan ke roda penggerak melalui perangkat transmisi, dan bagian-bagiannya. Energi mekanik kendaraan diubah menjadi energi listrik dan diumpankan kembali ke dalam alat penyimpan energi pada saat kendaraan direm. Sistem penggerak listrik meliputi motor, mekanisme transmisi, pengontrol motor dan komponen lainnya. Perancangan parameter teknis sistem penggerak energi listrik terutama mencakup daya, torsi, kecepatan, tegangan, rasio pengurangan transmisi, kapasitansi catu daya, daya keluaran, tegangan, arus, dll.

1) Pengontrol motor
Disebut juga inverter, ia mengubah masukan arus searah dari baterai menjadi arus bolak-balik. Komponen inti:
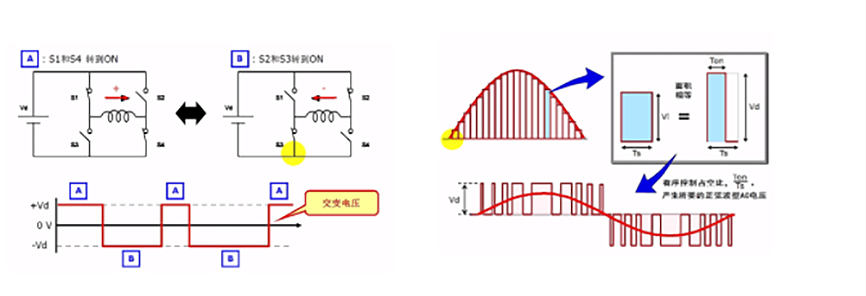
◎ IGBT: saklar elektronik daya, prinsip: melalui pengontrol, kendalikan lengan jembatan IGBT untuk menutup frekuensi tertentu dan saklar urutan untuk menghasilkan arus bolak-balik tiga fase. Dengan mengendalikan saklar elektronika daya agar menutup, tegangan bolak-balik dapat diubah. Kemudian tegangan AC dihasilkan dengan mengendalikan siklus kerja.
◎ Kapasitansi film: fungsi penyaringan; sensor arus: mendeteksi arus belitan tiga fasa.
2) Kontrol dan sirkuit penggerak: papan kontrol komputer, IGBT penggerak
Peran pengontrol motor adalah mengubah DC menjadi AC, menerima setiap sinyal, dan mengeluarkan daya dan torsi yang sesuai. Komponen inti: saklar elektronik daya, kapasitor film, sensor arus, rangkaian penggerak kontrol untuk membuka saklar yang berbeda, membentuk arus dalam arah yang berbeda, dan menghasilkan tegangan bolak-balik. Oleh karena itu, kita dapat membagi arus bolak-balik sinusoidal menjadi persegi panjang. Luas persegi panjang diubah menjadi tegangan dengan tinggi yang sama. Sumbu x mewujudkan kendali panjang dengan mengendalikan siklus kerja, dan akhirnya mewujudkan konversi luas yang setara. Dengan cara ini, daya DC dapat dikontrol untuk menutup lengan jembatan IGBT pada frekuensi tertentu dan saklar urutan melalui pengontrol untuk menghasilkan daya AC tiga fase.
Saat ini, komponen utama rangkaian penggerak bergantung pada impor: kapasitor, tabung sakelar IGBT/MOSFET, DSP, chip elektronik, dan sirkuit terpadu, yang dapat diproduksi secara mandiri tetapi memiliki kapasitas lemah: sirkuit khusus, sensor, konektor, yang dapat diproduksi diproduksi secara independen: catu daya, dioda, induktor, papan sirkuit multilayer, kabel berinsulasi, radiator.
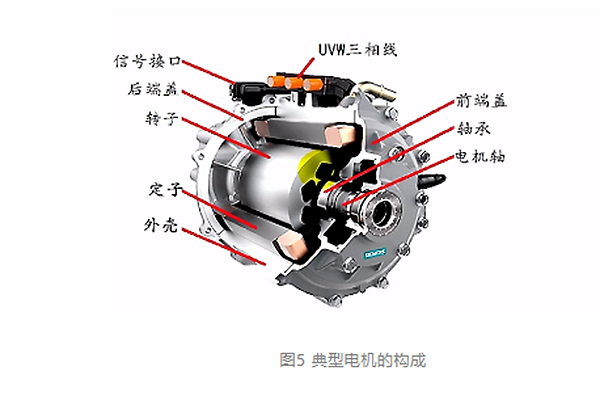
3) Motor: mengubah arus bolak-balik tiga fasa menjadi mesin
◎ Struktur: penutup ujung depan dan belakang, cangkang, poros dan bantalan
◎ Sirkuit magnetik: inti stator, inti rotor
◎ Sirkuit: belitan stator, konduktor rotor
4) Perangkat Transmisi
Gearbox atau peredam mengubah kecepatan torsi yang dihasilkan motor menjadi kecepatan dan torsi yang dibutuhkan oleh seluruh kendaraan.
Jenis motor penggerak
Motor penggerak dibagi menjadi empat kategori berikut. Saat ini, motor induksi AC dan motor sinkron magnet permanen adalah jenis kendaraan listrik energi baru yang paling umum. Jadi kami fokus pada teknologi motor induksi AC dan motor sinkron magnet permanen.
| Motor DC | Motor Induksi AC | Motor Sinkron Magnet Permanen | Motor Keengganan Beralih | |
| Keuntungan | Biaya Lebih Rendah, Persyaratan Sistem Kontrol Rendah | Biaya rendah, cakupan daya yang luas, Teknologi kontrol yang dikembangkan, Keandalan tinggi | Kepadatan Daya Tinggi, Efisiensi tinggi, ukuran kecil | Struktur Sederhana, Persyaratan Sistem Kontrol yang Rendah |
| Kerugian | Persyaratan perawatan tinggi, Kecepatan rendah, Torsi rendah, masa pakai singkat | Area efisien kecil Kepadatan Daya Rendah | Biaya tinggi Kemampuan adaptasi lingkungan yang buruk | Fluktuasi torsi besar Kebisingan kerja tinggi |
| Aplikasi | Kendaraan listrik kecil atau mini berkecepatan rendah | Kendaraan Bisnis Listrik dan Mobil Penumpang | Kendaraan Bisnis Listrik dan Mobil Penumpang | Kendaraan Bertenaga Campuran |
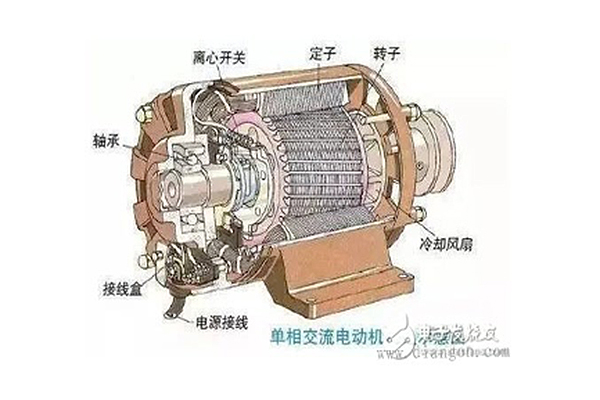 1) Motor Asinkron Induksi AC
1) Motor Asinkron Induksi AC
Prinsip kerja motor asinkron induktif AC adalah belitan akan melewati slot stator dan rotor: ditumpuk oleh lembaran baja tipis dengan konduktivitas magnet tinggi. Listrik tiga fasa akan melewati belitan. Menurut hukum induksi elektromagnetik Faraday, akan dihasilkan medan magnet yang berputar, yang menjadi alasan mengapa rotor berputar. Ketiga kumparan stator dihubungkan pada interval 120 derajat, dan konduktor pembawa arus menghasilkan medan magnet di sekitarnya. Ketika catu daya tiga fasa diterapkan pada pengaturan khusus ini, medan magnet akan berubah ke arah yang berbeda seiring dengan perubahan arus bolak-balik pada waktu tertentu, menghasilkan medan magnet dengan intensitas putaran yang seragam. Kecepatan putar medan magnet disebut kecepatan sinkron. Misalkan sebuah konduktor tertutup ditempatkan di dalam, menurut hukum Faraday, karena medan magnetnya bervariasi, Loop akan merasakan gaya gerak listrik, yang akan menghasilkan arus dalam loop. Situasi ini seperti lingkaran pembawa arus di medan magnet, menghasilkan gaya elektromagnetik pada lingkaran tersebut, dan Huan Jiang mulai berputar. Menggunakan sesuatu yang mirip dengan sangkar tupai, arus bolak-balik tiga fase akan menghasilkan medan magnet berputar melalui stator, dan arus akan diinduksi dalam batang sangkar tupai yang dihubung pendek oleh cincin ujung, sehingga rotor mulai berputar, yaitu mengapa motor disebut motor induksi. Dengan bantuan induksi elektromagnetik daripada dihubungkan langsung ke rotor untuk menginduksi listrik, serpihan inti besi isolasi diisi ke dalam rotor, sehingga besi berukuran kecil menjamin kehilangan arus eddy yang minimum.
2) Motor sinkron AC
Rotor motor sinkron berbeda dengan motor asinkron. Magnet permanen dipasang pada rotor, yang dapat dibagi menjadi tipe pemasangan di permukaan dan tipe tertanam. Rotor terbuat dari lembaran baja silikon, dan magnet permanen tertanam. Stator juga dihubungkan dengan arus bolak-balik dengan beda fasa 120, yang mengontrol besar kecilnya dan fasa arus bolak-balik gelombang sinus, sehingga medan magnet yang dihasilkan oleh stator berlawanan dengan yang dihasilkan oleh rotor, dan medan magnet. lapangan berputar. Dengan cara ini stator ditarik oleh magnet dan berputar bersama rotor. Siklus demi siklus dihasilkan oleh penyerapan stator dan rotor.
Kesimpulan: Penggerak motor pada kendaraan listrik pada dasarnya sudah menjadi mainstream, namun tidak tunggal melainkan terdiversifikasi. Setiap sistem penggerak motor mempunyai indeks komprehensifnya sendiri. Masing-masing sistem diterapkan pada penggerak kendaraan listrik yang ada. Kebanyakan dari mereka adalah motor asinkron dan motor sinkron magnet permanen, sementara beberapa mencoba untuk mengganti motor keengganan. Perlu diperhatikan bahwa penggerak motor mengintegrasikan teknologi elektronika daya, teknologi mikroelektronik, teknologi digital, teknologi kontrol otomatis, ilmu material, dan disiplin ilmu lainnya untuk mencerminkan penerapan komprehensif dan prospek pengembangan berbagai disiplin ilmu. Ini adalah pesaing kuat dalam motor kendaraan listrik. Untuk menempati tempat di kendaraan listrik masa depan, semua jenis motor tidak hanya perlu mengoptimalkan struktur motor, tetapi juga terus mengeksplorasi aspek cerdas dan digital dari sistem kendali.
Waktu posting: 30 Januari 2023


